摘要 :介紹了礦用電動機(jī)智能綜合保護(hù)器系統(tǒng)的總體結(jié)構(gòu)����,采用直接將交流信號整流、濾波��、調(diào)理��、采樣的方式變?yōu)槲⒖刂破髂軌蜃R別的直流信號�,通過對微控制器采集到的直流信號編程判斷來實現(xiàn)對電動機(jī)的相關(guān)保護(hù)控制、故障顯示與報警以及與上位機(jī)的通信��。同時還介紹了有關(guān)礦井下電動機(jī)經(jīng)常出現(xiàn)的故障及其原因和判斷這些故障所使用的檢測和保護(hù)方法。
關(guān)鍵詞: 電動機(jī)���;智能保護(hù)器���;結(jié)構(gòu)分析;微控制器����;互感器。
0引言
電動機(jī)在運行狀態(tài)下可能會發(fā)生各種各樣的故障����,這與工作環(huán)境、使用方式和維護(hù)周期等因素密切相關(guān)��。特別是在煤礦井下��,由于井下環(huán)境惡劣��,電動機(jī)長時間暴露在煤塵�����、潮濕等惡劣環(huán)境中,容易導(dǎo)致電動機(jī)散熱道堵塞等���,經(jīng)常會出現(xiàn)電動機(jī)的燒損�。因此電動機(jī)智能綜合保護(hù)器的設(shè)計就顯得非常重要���。
1電動機(jī)智能綜合保護(hù)器結(jié)構(gòu)分析
礦用電動機(jī)智能綜合保護(hù)器的系統(tǒng)指的是通過電流互感器和電壓互感器對煤礦井下電網(wǎng)供電系統(tǒng)進(jìn)行變壓�,通過信號調(diào)理電路和信號采集電路(A/D轉(zhuǎn)換電路)��,*后轉(zhuǎn)換成微控制器能夠識別的數(shù)字信號����;通過對微控制器進(jìn)行相關(guān)編程,對采集到的信號進(jìn)行處理�,判斷電動機(jī)當(dāng)前處在什么狀態(tài);通過對該狀態(tài)的判斷����,經(jīng)由電動機(jī)保護(hù)控制電路實現(xiàn)對電動機(jī)的保護(hù)和控制�。同時由于對煤礦井下電動機(jī)的現(xiàn)場巡檢并不是很方便,在此設(shè)計的電動機(jī)智能綜合保護(hù)器還要加上與井上上位機(jī)通信的功能�。為方便就地檢查,同樣需要在保護(hù)器上設(shè)置電動機(jī)狀態(tài)顯示與報警界面�����,實現(xiàn)良好的人機(jī)交互,同時應(yīng)加上按鍵調(diào)節(jié)功能以適應(yīng)不同電網(wǎng)電壓等級下對電動機(jī)不同的要求��。
2保護(hù)器工作狀態(tài)分析
2.1 漏電保護(hù)
煤礦井下電動機(jī)及其供電線路常見的漏電故障有:
(1)電動機(jī)或者供電線路因長期暴露在潮濕環(huán)境中�,導(dǎo)致其絕緣電阻下降,流向大地的對地電流增大�,從而使電動機(jī)及電氣設(shè)備外殼帶電。
(2)電動機(jī)或者供電線路帶電體發(fā)生部分裸露現(xiàn)象�,致使未受到高度重視的井下人員誤觸到該處,直接或者間接通過導(dǎo)體工具而致使其中一相接地�,造成漏電事故。
(3)電動機(jī)或者供電線路絕緣部分因為久置老化��、電壓性擊穿或者機(jī)械損壞等原因而發(fā)生一相中的金屬性接地或弧光接地�。
人身觸電造成,人身傷亡的危險主要與流經(jīng)人身的觸電電流和流過這些電流時間長短有關(guān)系���。一般在不考慮電網(wǎng)電容情況下��,人體觸到一相導(dǎo)線時�,30mA為允許通過人體的*大觸電電流��,即30mA以下不至于發(fā)生生命危險�。井下在660V時引爆瓦斯的**火花電流為50mA以下。所以,漏電**臨界電流值應(yīng)該為30mA���。
在忽略電網(wǎng)對地分布電容情況下�����,對于中性點不接地系統(tǒng)中人體觸電電流計算公式中:Ir為通過人體的電流�,單位為A���;E為供電電路的相電壓���,單位為V;r為供電電路每相的對地絕緣電阻值��,單位為Ω����;Rr為人體電阻值,單位為Ω����,在煤礦井下一般按照*低值為1kΩ計算�。
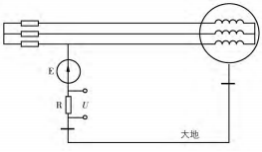
對于煤礦井下中性點不接地系統(tǒng),通常其漏電電流非常小,不易區(qū)分故障與否����,因此需要添加一個接地的檢測電源E,如圖1所示��。將附加的直流檢測電源E接入三相系統(tǒng)��,如果系統(tǒng)出現(xiàn)漏電現(xiàn)象��,那么電流將按照電源正極→電網(wǎng)對地絕緣電阻→三相電網(wǎng)系統(tǒng)→電源負(fù)極流向來運行��,由于單回路系統(tǒng)��,電流不變�,因此通過漏電保護(hù)電路檢測采樣電阻R兩端的電壓U的大小從而可以間接知道電網(wǎng)對地絕緣電阻阻值的變化,進(jìn)而可以檢測到電網(wǎng)是否發(fā)生漏電現(xiàn)象��。這種方法稱為附加直流電源漏電保護(hù)法�。
圖1 附加直流電源漏電保護(hù)
漏電閉鎖同樣是一種重要的漏電保護(hù)方法,顧名思義����,漏電閉鎖是指當(dāng)檢測到線路發(fā)生漏電時,需要閉鎖住電閘�����,防止人員送電之后因漏電而發(fā)生事故。當(dāng)三相系統(tǒng)未通電情況下�,通過附加直流電源方法可以檢測到電網(wǎng)對地絕緣電阻阻值的變化,從而判斷是否發(fā)生漏電現(xiàn)象�����。在三相電網(wǎng)未通電情況下��,如圖2所示�,接觸器KM主觸點斷開,接觸器KM常閉觸點將附加直流電源接入系統(tǒng)���,如果發(fā)生漏電���,則電壓U發(fā)生變化,從而觸發(fā)漏電保護(hù)電路動作�����,達(dá)到漏電閉鎖保護(hù)的目的����。
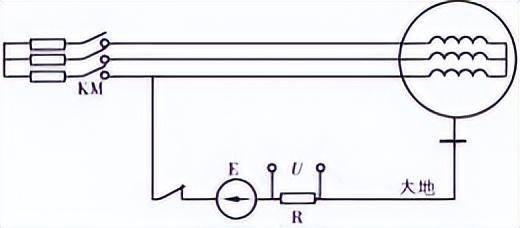
圖2 附加直流電源漏電閉鎖
2.2過載保護(hù)
常見的電動機(jī)運行方式主要有長時間運行、短時間運行及重復(fù)短時間運行三種��,在這三種運行方式下����,電動機(jī)的發(fā)熱情況各不相同。因此��,同一臺電動機(jī)按短時間運行方式或者重復(fù)短時間運行方式使用時可以允許有較大的輸出����,即可短暫地過載,而采用長時間運行方式時電動機(jī)不可長期過載運行��。為了確保電動機(jī)長期穩(wěn)定運行�����,不會因為短時間的過載而發(fā)生停止運行的現(xiàn)象��,這就要求電動機(jī)要有一定的過載能力�����。異步電動機(jī)的過載能力通常用*大力矩Mm除以額定力矩MH得到的商KM來表示�,中小型電動機(jī)的KM=1.6~1.8���,中型及大型電動機(jī)的KM=1.8~2.5,有特殊要求的電動機(jī)KM可以達(dá)到2.0~3.0或更大�。
在這里,通常將電動機(jī)過載保護(hù)特性定義為:電動機(jī)的過載倍數(shù)與其過載保護(hù)動作時間之間的關(guān)系���。如圖3所示為電動機(jī)的過載保護(hù)特性曲線��。
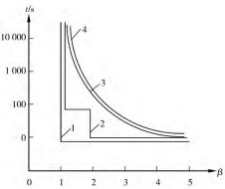
圖3電動機(jī)過載保護(hù)特性曲線
從圖3可以看出�,不同的保護(hù)特性曲線擁有一個共同的特點就是�����,電動機(jī)只能在保護(hù)特性曲線的左側(cè)正常工作�,曲線1、2��、3中的每一條與曲線4之間的區(qū)域為無效區(qū)域���,即該區(qū)域不能被充分利用�����。曲線3是以上三種曲線中*接近曲線4的�,也就是反時限過載保護(hù)特性效果*佳。
反時限過載保護(hù)的過載倍數(shù)即故障電流大小與過載保護(hù)的動作時間成反比���,電流的大小決定了動作時間的走勢�����。因此電動機(jī)的過載整定時間應(yīng)該為某一電流值的某一倍數(shù)下的動作時間。
電動機(jī)過載運行狀態(tài)指的是當(dāng)其運行電流大于額定電流時的工作狀態(tài)����,電動機(jī)過載時會引起電動機(jī)的銅耗急劇增加,從而使得電動機(jī)的繞組發(fā)熱導(dǎo)致電動機(jī)燒損�����,因此可以間接檢測電動機(jī)的運行電流來判斷電動機(jī)的發(fā)熱情況����,實現(xiàn)電動機(jī)過載的保護(hù)。因為這種方法檢測的對象是電流����,能適應(yīng)于一切電氣負(fù)載,而且其調(diào)整靈活��、維修方便,所以得到了廣泛的應(yīng)用����。因此,在本設(shè)計中�����,根據(jù)煤礦井下情況�,選用C=2時的極度反時限過載保護(hù)方法對電動機(jī)進(jìn)行保護(hù)。
2.3短路保護(hù)
由于電動機(jī)發(fā)生短路故障時將會帶來非常嚴(yán)重的后果�,因此,在設(shè)置電動機(jī)綜合保護(hù)器中的短路保護(hù)時應(yīng)該是速斷保護(hù)��。電動機(jī)的啟動電流往往非常之大��,接近短路時候的電流����。所以,電動機(jī)的短路整定電流倍數(shù)應(yīng)該大于使電動機(jī)穩(wěn)定啟動的*大電流�����,通常取電動機(jī)額定電流時的8~10倍,將時限設(shè)置為躲過電動機(jī)啟動時瞬間沖擊電流的時間���,這個時間一般大于0.04s����。
電動機(jī)在運行時通常還會發(fā)生堵轉(zhuǎn)故障��,堵轉(zhuǎn)故障發(fā)生時通過電動機(jī)的電流同樣非常大�,為區(qū)分堵轉(zhuǎn)故障電流和電動機(jī)正常啟動瞬間的電流���,一般將使電動機(jī)穩(wěn)定啟動的*大電流作為堵轉(zhuǎn)保護(hù)的整定值����,將時限設(shè)置為通常電動機(jī)在重載情況下啟動的時間��,這個時間一般為8~16s��。電動機(jī)的堵轉(zhuǎn)保護(hù)與短路保護(hù)共同構(gòu)成了電動機(jī)的短路保護(hù)���。
在本設(shè)計中采用對電流的鑒幅式保護(hù)原理��,其中可以對短路電流保護(hù)值進(jìn)行設(shè)定�����,以適應(yīng)于不同的電網(wǎng)等級中����。
2.4斷相與三相不平衡保護(hù)
引起電動機(jī)燒損的另一個原因就是三相不平衡,嚴(yán)重的三相不平衡則可能產(chǎn)生斷相���,占10%以上燒損的電動機(jī)是由這兩種原因引起的�,在做電動機(jī)綜合保護(hù)器時�����,這兩種情況必須考慮���。從廣義上來說�,電動機(jī)繞組上的輸入電流達(dá)到一定程度的不對稱即為三相不平衡�,這便是所謂的故障狀態(tài),更為嚴(yán)重的電動機(jī)繞組電流不對稱狀態(tài)就是電動機(jī)的斷相運行狀態(tài)��。
三相不平衡或者斷相故障增加了變壓器及輸電的銅損�。三相不平衡電流對系統(tǒng)銅損的影響為:
假設(shè)R是電動機(jī)系統(tǒng)三相電路與變壓器繞組之間的電阻之和,如果三相電流平衡��,假設(shè)IA=10A,IB=10A�,IC=10A,那么總銅損為102R+102R+102R=300R���;如果三相電流不平衡����,假設(shè)IA=5A����,IB=10A,IC=15A����,那么總銅損為52R+102R+152R=350R���,比平衡狀態(tài)的銅損增加了50R���,也就是增長了17%;在嚴(yán)重情況下��,也就是斷一相的情況下�����,假設(shè)IA=15A,IB=0A����,IC=15A,那么總銅損為152R+0+152R=450R�����,是平衡狀態(tài)時銅損的1.5倍��;在*嚴(yán)重情況下�,也就是斷兩相情況下,假設(shè)IA=0A���,IB=0A�����,IC=30A�,那么總銅損為0+0+302R=900R����,是平衡狀態(tài)時銅損的3倍�����。由此可見�����,三相不平衡或者斷相對電動機(jī)的損壞是相當(dāng)大的��,對其進(jìn)行檢測是必不可少的����。
當(dāng)三相電流平衡時�����,三相電流的值是相等的����,當(dāng)不平衡時�,每相將會發(fā)生相應(yīng)變化。本設(shè)計中��,根據(jù)以上原理通過式(3)計算方式來確定三相電流的不平衡度����。
Imax-Imin公式中:ω為三相電流不平衡度�����;Imax為三相線電流中電流*大值����;Imin為三相線電流中電流*小值����。
由此,根據(jù)式(3)計算出的不平衡度可以判斷三相不平衡的程度�����,當(dāng)計算結(jié)果為100%時��,則說明電路中已經(jīng)發(fā)生斷相故障���,此時應(yīng)該立即執(zhí)行相應(yīng)保護(hù)動作���。2.5欠壓和過壓保護(hù)欠壓和過壓保護(hù)是煤礦井下必不可缺的保護(hù)類型之一。當(dāng)電網(wǎng)電壓下降到額定電壓的75%時即被稱為欠壓�,此時保護(hù)器對電動機(jī)進(jìn)行保護(hù)延時跳閘�����;同樣��,當(dāng)電網(wǎng)電壓超過115%的額定電壓時即被稱為過壓�����,此時保護(hù)器對電動機(jī)進(jìn)行保護(hù)延時跳閘�。采用鑒幅式保護(hù)原理對電動機(jī)進(jìn)行欠壓和過壓保護(hù)���。鑒幅式保護(hù)原理是指將采集到的電網(wǎng)電壓參數(shù)進(jìn)行整流���、濾波,通過對A/D轉(zhuǎn)換器結(jié)果進(jìn)行判斷之后執(zhí)行相應(yīng)延時保護(hù)動作��。
3
保護(hù)器選擇分類
現(xiàn)代智能電機(jī)保護(hù)器還有很多在實際生產(chǎn)中需要的功能�����,如回看功能����、遠(yuǎn)程通訊、遠(yuǎn)程控制�����、多種啟動方式選擇等��。
保護(hù)器在類型上分為:一般普通型���、數(shù)碼顯示監(jiān)控型�、智能監(jiān)控中文顯示型�。
3.1一般普通型
結(jié)構(gòu)比較簡單,主要功能以突出過載��、缺相(三相不平衡)堵轉(zhuǎn)等故障保護(hù)��。故障類型采用指示燈顯示��。
3.2數(shù)碼顯示監(jiān)控型
數(shù)碼顯示監(jiān)控型保護(hù)器���,內(nèi)部電路運用單片機(jī)�����,采用數(shù)碼管作為顯示窗口��,智能化綜合保護(hù)����,集保護(hù)、測量�、通訊、顯示為一體��。整定電流采用數(shù)字設(shè)定�,用戶可以自行對各種參數(shù)修正。
3.3智能監(jiān)中文顯示控型
智能漢字顯示更適合國內(nèi)���,與其他類型相比���,功能更加完善。此類產(chǎn)品對各種參數(shù)��、狀態(tài)���、信息直接在操作面板單元上中文漢顯液晶顯示����,使界面更加直觀醒目,并且支持遠(yuǎn)程計算機(jī)通訊功能����。啟動方式有多種選擇�����,并有存儲回看功能��,給后期的維護(hù)維修提供了數(shù)據(jù)依據(jù)��。
4
保護(hù)器在選擇上應(yīng)注意事項
在選擇保護(hù)器的同時��,還要考慮到以下幾種因素:
(1)電動機(jī)主要參數(shù):主要是功率�、電壓、電流�、頻率方面,為選型提供依據(jù)。
(2)使用環(huán)境因素的影響:主要指溫度�����、濕度�、污染等。
(3)電動機(jī)使用方向:指拖動機(jī)械設(shè)備要求���。
(4)控制系統(tǒng):控制模式有手動���、自動化程序等工作運行�。啟動方式有直接�、降壓、星三角�����、頻敏變阻器����、變頻器、軟起動等啟動方式�����。
(5)安裝要求:在選型上要考慮安裝空間大小����,留有足夠的余量,便于散熱及接線�、維護(hù)、查看方便���。
(6)靈敏度要求:是帶載啟動還是空載啟動����,是滿載還是逐漸加載,主要是在電流設(shè)定方面要考慮到啟動瞬間的電流值與額定電流值之間的時間差�����。
(7)其他方面:如生產(chǎn)現(xiàn)場對電動機(jī)位置的隨意性��、啟動停止的頻繁程度等�����。
5
ARD系列電動機(jī)保護(hù)器產(chǎn)品選型介紹
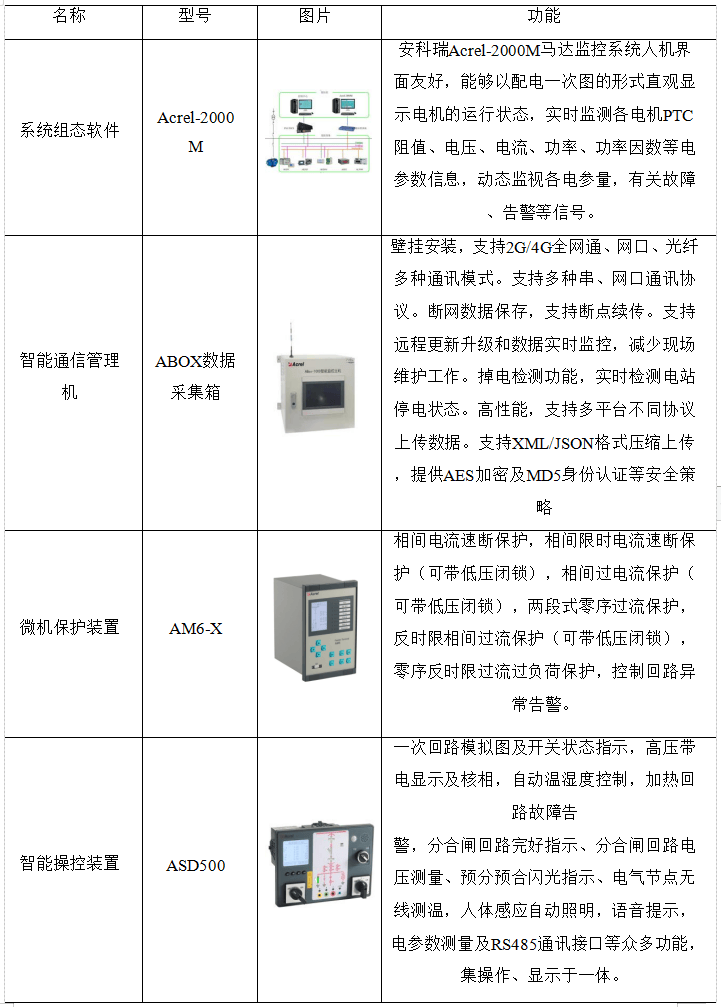
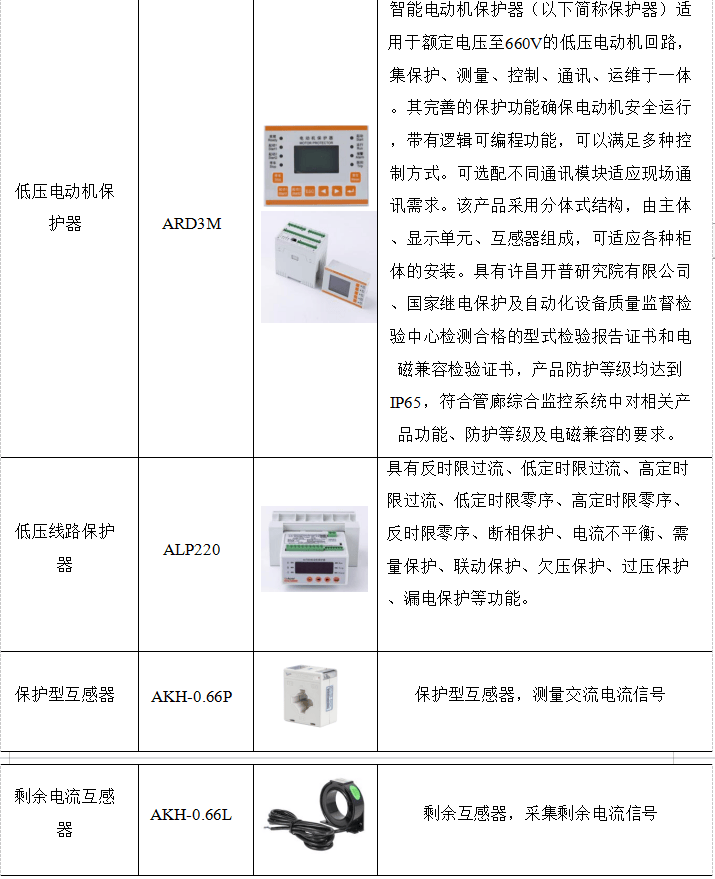
ARD智能電動機(jī)保護(hù)器適用于額定電壓至660V的低壓電動機(jī)回路��,集保護(hù)���、測量、控制���、通訊�、運維于一體��。其完善的保護(hù)功能確保電動機(jī)**運行,帶有邏輯可編程功能��,可以滿足多種控制方式�。該產(chǎn)品采用分體式結(jié)構(gòu),由主體��、顯示單元�����、互感器組成����,可適應(yīng)各種柜體的安裝?���?蛇x配不同通訊模塊適應(yīng)現(xiàn)場通訊需求。

5.1��、功能特點
■支持基波和全波電力參數(shù)測量(U���、I����、P、Q��、S��、PF����、F、EP����、EQ)�����,電流及電流不平衡度��、電流正序���、負(fù)序�����、零序分量����、電壓、三相電壓相角����、剩余電流。
■保護(hù)功能包括過載反時限���、過載定時限����、接地�����、起動超時����、漏電、欠載�、斷相、堵轉(zhuǎn)�����、阻塞、短路�、溢出、不平衡(電流�、電壓)、過功率�、欠功率、過壓�、欠壓、相序�、溫度、tE時間���、外部故障����、起動次數(shù)限制�����、運行時間報警����、故障次數(shù)報警�����。
■9路可編程DI輸入,默認(rèn)采用內(nèi)置DC24V電源���,也可選擇外部有源濕接點���。
■5路可編程DO輸出,滿足直接起動���,星—三角起動�,自耦變壓器起動���,等多種起動方式����,可通過通訊總線實現(xiàn)主站對電動機(jī)的遙控“起/?���!薄?
■可選抗晃電功能:支持晃電立即再啟動����、失壓重起動�。
■可選配MODBUS_RTU通訊�����、PROFIBUSDP通訊����,支持*多2路通訊接口。
■可選配1路DC4-20mA模擬量輸出接口��,與DCS系統(tǒng)相接����,可實現(xiàn)對現(xiàn)場設(shè)備的監(jiān)控。
■具有故障記錄����、起動記錄、停車記錄�����、DI變位記錄和再起動記錄等各類事件記錄��。
■顯示界面液晶顯示��,支持中/英文切換���。
5.2��、產(chǎn)品選型
6結(jié)論
本文結(jié)合煤礦井下實際情況,設(shè)計了一款礦用電動機(jī)智能綜合保護(hù)器。設(shè)計方案切合實際要求����,實現(xiàn)了電動機(jī)在電網(wǎng)中出現(xiàn)漏電、欠壓����、過壓、三相不平衡�、斷相、過載��、短路等故障狀態(tài)時的檢測與保護(hù)功能��,確保了系統(tǒng)的可靠性��、準(zhǔn)確性�、抗干擾性和靈敏性。
